

Development of the theory of sensorless vector control of electromechanical systems with induction motors.
Specialty 05.09.03 “ElectrotechnicalComplexes and Systems”
The dissertation is a manuscript. The work was performed at the Department of automation of electromechanical systems and electric drive of the National Technical University of Ukraine “Igor Sikorsky Kyiv Polytechnic Institute” of the Ministry of education and science of Ukraine
| Scientific consultant: | Sc.D. prof. S. Peresada National Technical University of Ukraine “Igor Sikorsky Kyiv Polytechnic Institute», head of the Department of automation of electromechanical systems and electric drive. |
| Official opponents: | Sc.D. prof. A. Cherny Mikhail Ostrogradsky Kremenchug National University, director of the educational and Scientific Institute of electrical mechanics, energy saving and control systems; |
| Sc.D. prof. I. Shchur National University “Lviv Polytechnic», head of the Department of electromechatronics and computerized electromechanical systems; |
|
| Sc.D. prof. corresponding member of the National Academy of Sciences of Ukraine I. Volkov Institute of electrodynamics of the National Academy of Sciences of Ukraine, chief researcher of the Department of transformation and stabilization of electromagnetic processes. |
GENERAL CHARACTERISTICS OF THE WORK
Relevance of the topic. Electromechanical automatic control systems (EMC) for various technological purposes consume more than half of the world’s generated electrical energy, converting it into mechanical energy using various types of electric drives. At the same time, the share of energy converted by AC electric drives exceeds 90%, of which more than 80% belongs to asynchronous motors (AM). The widespread use of asynchronous motors is due to the simplicity of their design, low cost, high reliability, and in recent decades a significant development of the theory of control of this type of motor and power electronics.
 |
 |
 |
 |
The constant growth of the overall level of technological development and requirements for the quality and cost of products, as well as the rapid development of electric mobility, sets new challenges for World Scientific schools to further improve the quality of management, energy efficiency and reliability of electromechanical systems.
Зa significant contribution to the development of asynchronous motor control methods has been made by foreign and domestic scientists, such as: A.V. Sadovoi, A. A. Lozinsky, I. Z. Shchur, A. P. Cherny, L. I. Mazurenko, J. Holtz, T. Lipo, P. Vas, D. Novotny, K. Rajashekara, A. Kawamura, K. Matsuse, H. Kubota, M. Kazmierkowski, R. Marino, R. Lorenz, M. Bodson and others.
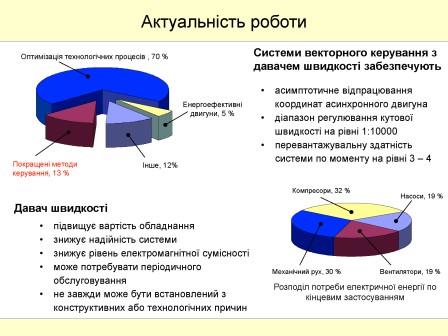
The main purpose of most electric drives is to coordinate the coordinates of technological objects in order to meet the requirements of the technological process. Since the quality indicators of controlling the coordinates of electric drives largely determine the productivity of equipment, product quality and affect the indicators of energy and resource conservation, the growing requirements for the final product and its cost require their constant improvement. Given the dominant share of asynchronous electric drives in the industrial, municipal, agricultural and transport sectors of the economy, it is fundamental to solve the problem of improving the quality of control and energy efficiency of electromechanical systems with asynchronous electric motors, which are nonlinear multidimensional objects with a partially measurable state vector that are under the action of coordinate and parametric perturbations. In general, this problem can be considered solved for EMC with high accuracy of control of output coordinates (metalworking, robotics, positioning systems), which use vector field-oriented control based on information about the mechanical coordinates of an electric motor. Meanwhile, in the most significant both in terms of the number and converted power of EMC technological objects with low and medium requirements for static and dynamic indicators of coordinate management quality (turbomechanisms, lifting and transport systems, extrusion equipment, rolling production, etc.), direct receipt of information about mechanical coordinates is not expected or is impractical, which is due to reliability requirements, design features, and at low capacities also economic factors. The structure of a system without a speed sensor (system without a sensor) determines the most complex statement of the problem of controlling objects in which the full vector of regulated coordinates of the electromechanical converter (mechanical and electromagnetic coordinates) is not measurable, that is, in conditions of incomplete information about the technological object, some of the parameters of which may additionally be undefined.
The control methods implemented in commercial products for this class of technological applications largely do not have a strict theoretical justification, and in terms of quality control of the coordinates of an electromechanical converter and a technological object, they do not meet the requirements of a significant number of technological applications. This determines the relevance of developing and improving the theory of vector control of electromechanical systems based on ad without measuring mechanical coordinates, which is what this dissertation is devoted to.
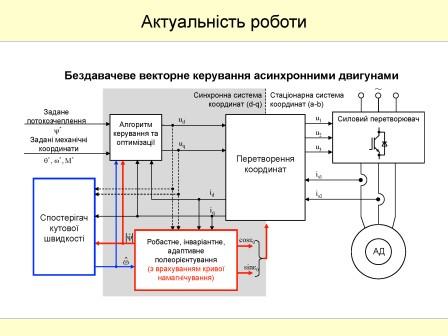
The paper considers the scientific and applied problem of working out given trajectories of changes in the mechanical coordinates of an electromechanical system (moment, angular velocity) and the modulus of the flow coupling vector with simultaneous asymptotic field orientation in conditions when mechanical coordinates and components of the flow coupling vector are not available for measurement. The solution of this problem in AD-less control systems allows us to meet the requirements of most technological applications of electromechanical systems to the quality indicators of mechanical coordinate control, to use energy-efficient algorithms for controlling the flow coupling of an electromechanical converter, without affecting the processes of regulating mechanical and technological coordinates of electromechanical automatic control systems.
Relationship of work with scientific programs, plans, and topics. Research on the topic of the dissertation was carried out at the Department of automation of electromechanical systems and electric drive of the National Technical University of Ukraine “Igor Sikorsky Kyiv Polytechnic Institute» on topics funded by the Ministry of education and science of Ukraine: “fundamentals of the theory of highly efficient automatic control systems for complex technological objects with vector-controlled electric motors”, “fundamentals of the theory of adaptive electromechanical automatic control systems with vector-controlled AC electric motors in conditions of incomplete information”, “Fundamentals of the theory of vector-controlled electromechanical AC systems with kinematic rolling pair”, “methods of robust adaptive control of electromechanical systems with increased dynamic and energy indicators», “Development of an energy-efficient electromechanical electric bus system based on an adaptive vector-controlled asynchronous electric drive with battery-supercapacitor power supply”, as well as within the framework of self-supporting contracts :” development of software for the control unit of a prototype of a traction electric drive and research of its characteristics», “Development of an electric traction control system for a tram car”. Some of the research was carried out within the framework of Interuniversity cooperation with the University of Nottingham (Great Britain) in the direction of “vector control of asynchronous motor coordinates with maximization of the moment-current ratio”, as well as the University of Applied Sciences of Hesse (Germany) in the direction of “Vector Control Systems for asynchronous motors with increased control quality and energy efficiency”. When performing research works, the author developed new structures of vector control systems for mechanical and electromagnetic coordinates of an asynchronous motor, the concept and method of synthesis of non-giver vector control in direct field orientation, performed practical implementation and experimental testing of developed control structures, led the development, production and experimental testing of prototypes of electric drives for industrial implementation, and also served as a responsible contractor and project manager.
Purpose and objectives of the study. The aim of the work is to develop the theory of synthesis and analysis of driveless electromechanical systems with vector-controlled asynchronous electric motors, aimed at improving their dynamic and static characteristics by applying nonlinear and adaptive control methods.
 |
 |
 |
 |
To achieve this goal, the following main tasks were solved:
- analysis of existing methods of trouble-free vector control (BVC) of coordinates of asynchronous motors, including those implemented in serial electric drives, in order to determine their Achievable Control Quality Indicators and justify the need to solve the scientific and applied problem considered in the paper;
- analysis of the natural stability properties of an asynchronous motor and development of methods for quasi-vector angular velocity control that are as simple as possible from the point of view of practical implementation;
- development of a new concept for Vector coordinate control of asynchronous motors with incomplete information about the state vector;
- development of a new method for synthesizing algorithms for vector control of asynchronous motors without measuring mechanical coordinates;
- development of a method for estimating immeasurable mechanical AM coordinates based on information about stator currents and voltages;
- solving the main problems of coordinate control of electromechanical systems with asynchronous motors based on the developed methods of synthesis and estimation;
- development of a package of modeling programs and research of developed vector control structures by mathematical modeling;
- creation of hardware and software tools for practical implementation of AM-less vector control systems;
- conducting experimental research and industrial implementation.
The object of research is coordinate control processes in electromechanical systems based on asynchronous motors with a closed – loop rotor without measuring mechanical coordinates.
The subject of the research is methods of analysis and synthesis of algorithms for vector control of electromechanical systems based on asynchronous motors without measuring mechanical coordinates.
Research methods. The results presented in this paper are obtained using the methods of modern nonlinear control theory such as: feedback linearization, the second Lyapunov method, adaptive control, the theory of singularly degenerate systems, as well as methods of mathematical and Physical Modeling.
Scientific novelty of the results obtained.
- A new concept of direct vector control of regulated coordinates of asynchronous motors has been developed: the flow coupling vector and angular velocity in conditions of their immeasurability, which is the general theoretical basis for the development of methods for synthesizing control algorithms and consists in the fact that due to the action of nonlinear control, the decomposition of the original structure of an electromechanical object into three related subsystems is purposefully formed, the stability and robustness properties of which provide the composite system with local exponential stability.
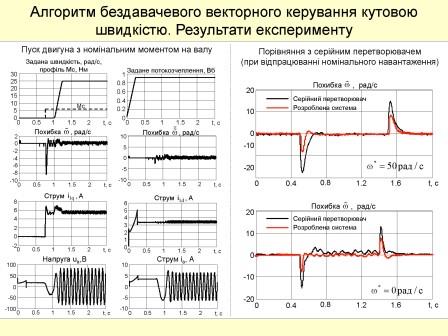
- A new method for synthesizing vector controls by asynchronous machines without measuring mechanical coordinates, which form a composite structure in the form of nonlinearly connected subsystems of adaptive estimation of angular velocity, mechanical and electromagnetic with exponential stability properties and hierarchical time division of dynamic processes, which, under conditions of excitation persistence, guarantees a closed composite system local exponential stability, this ensures for the first time that the specified trajectories of the angular velocity and modulus of the flow coupling vector are worked out reliably to the imperfection of the inverter with simultaneous asymptotic field orientation.
- A new method of open quasi-vector control of an asynchronous motor (without measuring currents and angular velocity) has been developed, which, due to the formation of nonlinear compensating components synthesized using the second Lyapunov method, provides asymptotic development of given trajectories of changes in the angular velocity and modulus of the flow coupling vector in the absence of load, as well as local stability in the loaded state in the region determined by the parameters of AM.
- For the first time, a method for adaptive estimation of the constant or slowly changing angular velocity and flow coupling of the rotor of an asynchronous machine is developed, which, based on the proposed form of the Lyapunov function and a special coordinate transformation, allows us to overcome the problem of nonlinear parameterization in the equations of the ad model, the outputs of which are not measured, and thanks to this, synthesize an adaptive observer of the rotor flow coupling vector with the property of local exponential asymptotic stability under conditions of excitation persistence.
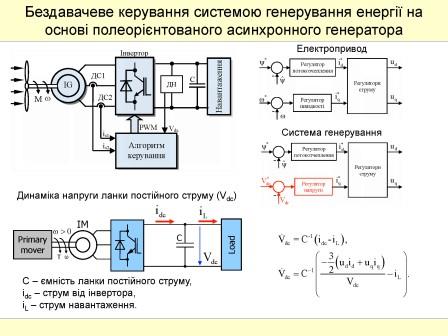
- The method of direct field-oriented vector control of an asynchronous generator is improved by constructing an adaptive system based on the use of an adaptive observer of the flow coupling and angular velocity of the rotor according to claim 4 and the nonlinear separation principle, which for the first time provides local asymptotic voltage regulation in the DC link, as well as working out the module of the flow coupling vector of the rotor without measuring the angular velocity.
- The method of torque-free vector control with maximization of the moment-current ratio is improved by taking into account the saturation of the magnetic system of the motor, as well as the formation of a given flow coupling as a dynamic function of the moment, which for the first time made it possible to ensure its asymptotic development both in static and in dynamics over the entire range of torque changes.
 |
 |
 |
 |
Practical significance of the results obtained.
- The theory of synthesis of BVC systems by asynchronous motors is developed, which made it possible to improve the quality indicators of coordinate control in a wide range of industrial mechanisms that use various modifications of frequency control. In electromechanical systems of medium-dynamic applications, it is possible to provide the required level of quality indicators for regulating mechanical coordinates without installing a speed sensor, which increases their reliability, reduces the cost and maintenance costs.
- The structure of the quasi-vector control algorithm made it possible to generate improved static and dynamic characteristics, as well as to force the excitation processes of an asynchronous machine with fully open Control, which allowed expanding the scope of use of open control systems for asynchronous motors.
- The developed algorithms for trouble-free control of an asynchronous generator made it possible to increase the reliability and reduce the cost of electrical energy generation systems based on them.
- Driver-free control algorithms with maximizing the moment-current ratio and taking into account the magnetization curve made it possible to create electric traction drives for electric transport with improved energy and dynamic characteristics.
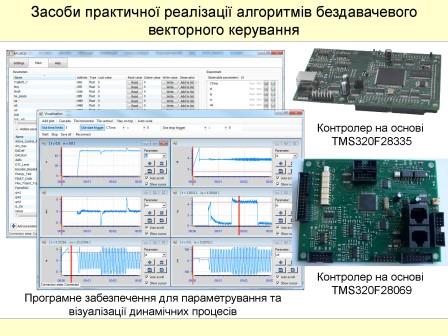
- The technology of rapid prototype testing of asynchronous motor control algorithms has been developed, which includes a package of modeling programs, a family of controllers based on digital signal processors (TMS320F28335, TMS320F28069) and software for them, as well as a number of experimental stands with asynchronous motors in the power range from 0.75 to 50 kW, allows you to perform practical implementation and experimental studies of new control structures in laboratory conditions in time that is commensurate with the time of conducting mathematical modeling.
- A number of BVC systems with a capacity of up to 240 kW have been developed, manufactured and experimentally tested, including three prototypes of an electric traction drive with improved dynamic and energy characteristics for use in trolleybuses, trams and electric buses.
- The results of the work were implemented: in serial general industrial asynchronous electric drives with a capacity from 15 to 100 kW produced by “Energoresurs”, Lviv; in a prototype of a traction electric drive for promising models of trolleybuses and tram cars in the state enterprise “research and design and Technological Institute of urban economy”, Kiev; in the prototype of the electric traction drive of a tram car with a capacity of 180 kW produced by Prjsc “Zaporozhye electrical equipment plant”, Zaporozhye; in the educational process at the National Technical University of Ukraine “Igor Sikosrsky Kyiv Polytechnic Institute” when teaching the disciplines “modeling of electromechanical systems”, “electromechanical systems of electric vehicles”, “digital signal processing in electromechanical systems”.
 |
 |
Publications. Based on the research results, 64 scientific papers were published, including 1 monograph, 49 articles in scientific professional publications (including 1 article in a foreign country publication, 9 in Ukrainian publications included in international scientometric databases), 14 abstracts in conference proceedings.





