

Високопродуктивний уніфікованих контролер на основі DSP TMS320F28335 для електромеханічних систем
Функціональна схема розробленого уніфікованого контролеру показана на рис. 1, а його зовнішій вигляд – на рис. 2. Ядро контролеру засновано на цифровому сигнальному процесорі (ЦСП) TMS320F28335, який має 32-розрядне ядро з модулем виконання операцій над числами з плаваючою комою (Floating Point Unit), модулі прямого доступу до пам’яті і обробки переривань, а також широкий набір комунікаційних інтерфейсів і периферійних модулів.
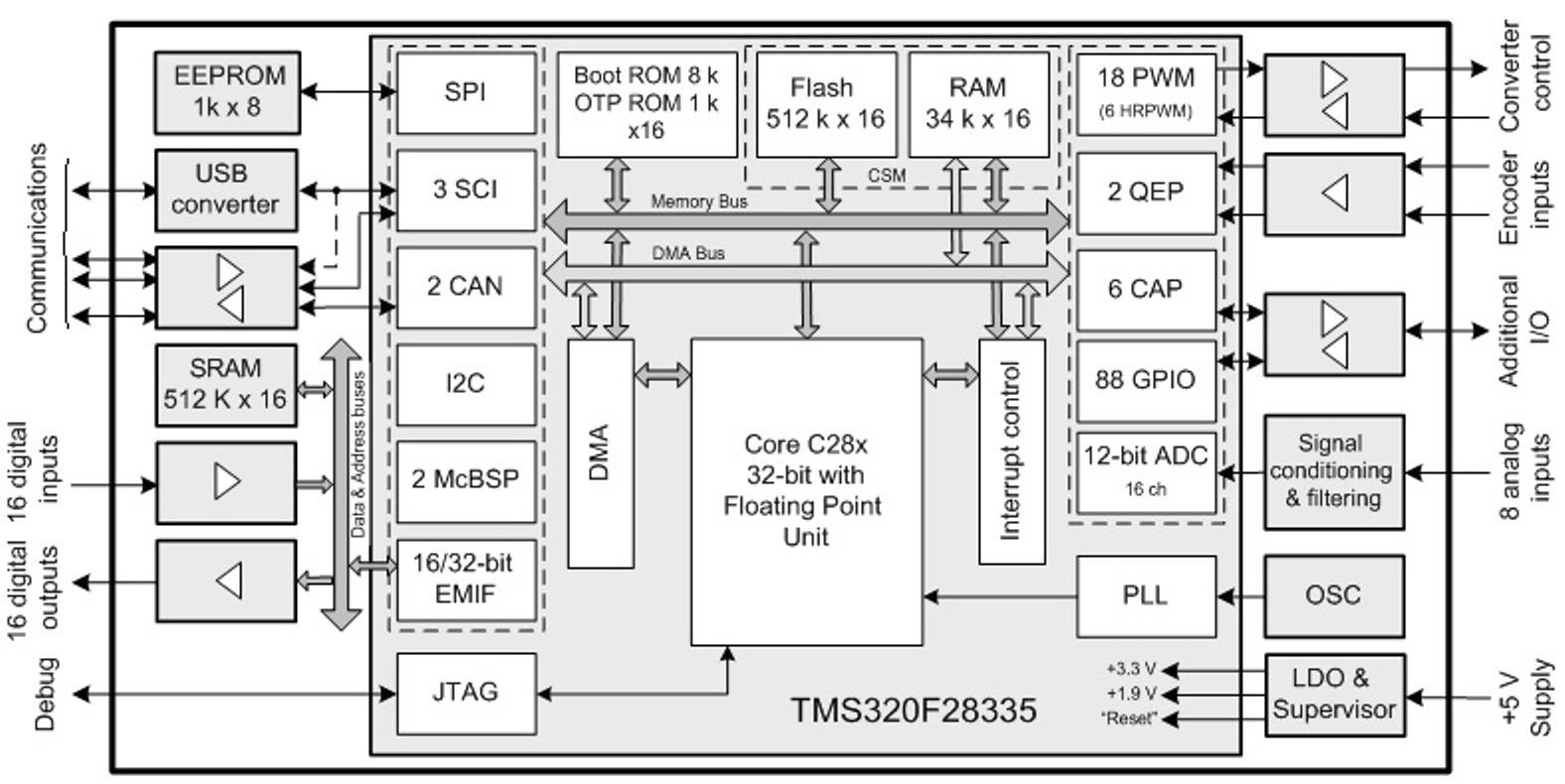
Рис. 1. Функціональна схема уніфікованого контролеру
Конструктивне виконання контролеру забезпечує можливість його вбудовування як до існуючих, так і силових перетворювачів, які розроблюються.
Спеціалізовані периферійні модулі ЦСП, такі як генератори широтно-імпульсної модуляції (ШІМ), оброблювачі квадратурних сигналів від фотоімпульсних давачів швидкості (QEP), модулі захвату сигналів (CAPture), аналогово-цифрові перетворювачі (ADC – analogue to digital controller), використовувані для побудови керуючих приладів електротехнічних та електромеханічних систем характеризуються високими показниками якості первинної обробки сигналів та гнучкістю налаштування з різними схемотехнічними рішеннями.
Дані властивості зберігаються і в схемах узгодження сигналів, що розташовані на платі контролеру, з метою забезпечення достатньо високого рівня уніфікації. Як видно з рис. 1, в контролері передбачена можливість використання високошвидкісних комунікаційних інтерфейсів, що дозволяє будувати розподілені системи керування в реальному часі, здійснювати візуалізацію динамічних процесів і робити настроювання системи. Основні характеристики контролеру зведені в табл. 1.
Рис. 2. Зовнішний вигляд контролеру
Таблиця 1. Характеристики контролеру
| Тактова частота, розрядность ядра/пам’яті | 150 МГц, 32-bit/16-bit |
| Пам’ять | 256k х 16 Flash, 34k x 16 SRAM, 8k x 16 Boot ROM 1k x 16 OTP ROM (on-chip); 512k x 16 SRAM, 1k х 8 Serial EEPROM (on-board) |
| Кількість універсальних аналогових входів | 8, 12 розрядний АЦП з часом перетворення 80 нс |
| Дискретні входи / виходи | 16/16 |
| Керування силовими перетворювачами | 9 конфігурованих ШІМ виводів; 6 входів для сигналів драйверного захисту силових ключів |
| Сигнали фотоімпульсних давачів швидкості; модулі захвату сигналів | 2 каналу для підключення фотоімпульсних давачів швидкості /положення; до 6 входів модулю захвату сигналів |
| Комуникаційні інтерфейси | USB 2.0 (on-board); 1 синхронний послідовний порт; 2 асинхронних послідовних портів; сигнали CAN інтерфейсу для зовнішнього трансіверу |
| Програмування та налагодження | Інтерфейс JTAG, три налагоджувальних світлодіода |
| Габарітні розміри, живлення | 125 х 80 х 25, +5 В |
Розробка та відладка програмного забезпечення контролеру здійснюється за допомогою JTAG інтерфейсу і програмного пакету Сode Composer Studio.
Завдяки високій продуктивності процесора, багатій периферії і функціональній гнучкості, розроблений контролер дозволяє реалізувати практично будь-який з відомих алгоритмів керування двигуном змінного або постійного струму.
Для уніфікованого контролеру розроблено базове програмне забезпечення (ПЗ), яке фактично є його операційною системою. ПЗ має типову структуру, яка застосовується в системах реального часу, при цьому квантування за часом здійснюється по перериваннях апаратного таймеру процесора з регульованим тимчасовим інтервалом.
Для керування силовими перетворювачами розроблено підпрограми формування імпульсів управління ключами за законами векторної і скалярної ШІМ з налаштованим мертвим часом, а також реалізована компенсація впливу мертвого часу на процеси управління електричної машиною.
Модуль вимірювання аналогових сигналів синхронізований з процесами генерування ШІМ так, що аналогові перетворення здійснюються в моменти часу, коли відсутня комутація силових ключів, що дозволяє мінімізувати комутаційні перешкоди в сигналах вихідних струмів інвертора.
Зв’язок керуючого контролера з персональним комп’ютером (ПК) організована з використанням USB-інтерфейсу. Для налаштування систем побудованих на основі розробленого уніфікованого контролера розроблено спеціальне програмне забезпечення, яке дає можливість зчитувати і встановлювати необхідні значення параметрів, а також візуалізувати процеси в реальному масштабі часу, з подальшим збереженням результатів в зручних для подальшого аналізу форматах. Під час проведення експерименту одночасно можуть відображатися до 16 внутрішніх змінних контролера з дискретністю 200..800 мкс.
З огляду на високу продуктивність і широкі можливості по візуалізації процесів, контролер може бути використаний не тільки для промислового впровадження нових алгоритмів управління, а й для побудови дослідницьких лабораторних установок із застосуванням концепції швидкого прототипного тестування. При цьому розроблене базове ПЗ, дозволяє здійснювати практичну реалізацію нових алгоритмів управління в короткі терміни, співмірні з часом, який витрачається на побудову моделі в популярних пакетах моделюють програм.





