


ПОТЯГИ НА МАГНІТНІЙ ПОДУШЦІ – ТРАНСПОРТ МАЙБУТНЬОГО
Потяги на магнітній подушці, Maglev (від слів «magnetic levitation») – найшвидший вид наземного громадського транспорту. І хоча в комерційну експлуатацію поки введено всього декілька таких систем, дослідження і випробування прототипів магнітних поїздів проводяться в різних країнах.
ЯК ЦЕ ПРАЦЮЄ
Про базові властивості магнітів ми знаємо ще зі шкільних уроків фізики. Кожен в дитинстві грався кільцевими магнітами від динаміків. Якщо піднести північний полюс постійного магніту до північного полюса іншого магніту вони будуть відштовхуватися. Якщо один з магнітів перевернути – притягатися. Цей простий принцип закладений в поїздах Maglevа, які летять по повітрю над шляховим полотном на незначній відстані.
В основі технології магнітного підвісу лежать три основні підсистеми: левітації, стабілізації і прискорення. У той же час на даний момент існує дві основні технології магнітного підвісу і одна експериментальна, доведена лише на папері.
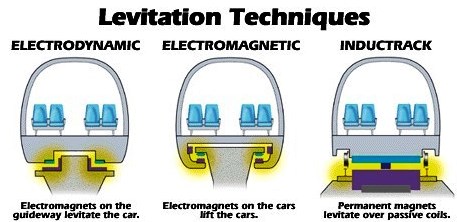
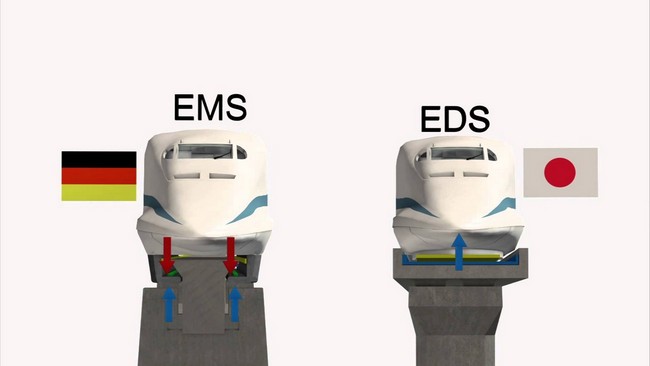
Потяги, побудовані на базі технології електромагнітного підвісу (EMS) для левітації використовують регульовані електромагніти постійного струму. При цьому практична реалізація даної системи схожа на роботу звичайного залізничного транспорту, але замість колісних пар використовується система електромагнітів – опорних і напрямних. Опорні та напрямні магніти при цьому взаємодіють з магнітопроводами, розміщеним на краях Т-подібного шляху. Головний недолік технології EMS – невелика відстань між опорним магнітом і статором, яка становить 15 міліметрів і має контролюватися спеціальними швидкодіючими автоматичними системами регулювання повітряного зазору. На базі технології EMS побудовані поїзда Transrapid і, зокрема, шанхайський Maglev.

Потяги на базі технології EMS приводяться в рух і здійснюють гальмування за допомогою лінійного двигуна, який являє собою звичайний статор (нерухома частина лінійного електродвигуна), розгорнутий вздовж нижньої частини полотна, а опорні електромагніти, в свою чергу, працюють в якості ротора цього електродвигуна. Таким чином, замість отримання крутного моменту, змінний струм в котушках генерує біжуче електромагнітне поле, яке переміщує потяг безконтактно. Зміна сили і частоти змінного струму дозволяє регулювати тягу і швидкість потягу.
У разі застосування технології електродинамічного підвісу (EDS) левітація здійснюється при взаємодії магнітного поля, створюваного надпровідними магнітами на борту потягу з електропровідним полотном. На базі технології EDS побудовані японські поїзда JR-Maglev. На відміну від технології EMS, в якій застосовані звичайні електромагніти з джерелом неперервного живлення, надпровідні електромагніти проводять струм навіть після того, як джерело живлення відключене. Проте, кріогенна система охолодження, яка використовується для підтримання наднизьких температур в котушках, виявляється досить дорогою.
Головною перевагою системи EDS є висока стабільність – при скороченні відстані між полотном і магнітами виникає сила відштовхування, яка повертає магніти в початкове положення, в той же час збільшення відстані знижує силу відштовхування, що веде до стабілізації системи. У цьому випадку ніякої електроніки для контролю і коригування відстані між поїздом і полотном не потрібно.
В той же час, достатня для левітації складу сила виникає тільки на великих швидкостях. З цієї причини поїзд на системі EDS повинен бути оснащений колесами, які забезпечують рух при низьких швидкостях (до 100 км/год).
Варто також відзначити, що сильні магнітні поля в секції для пасажирів породжують необхідність установки магнітного захисту. Без екранування подорож в такому вагоні для пасажирів з електронним стимулятором серця або магнітними носіями інформації (HDD і кредитні картки), протипоказана.
Третьою, близькою до реалізації технологією, яка існує поки тільки на папері, є варіант EDS з постійними магнітами Inductrack, для активації яких не потрібна енергія. До недавнього часу дослідники вважали, що постійні магніти не володіють достатньою для левітації поїзда силою. Однак цю проблему вдалося вирішити шляхом розміщення магнітів у так званий «масив Хальбаха». Магніти при цьому розташовані таким чином, що магнітне поле виникає над масивом, а не під ним, і здатні підтримувати левітацію поїзда на дуже низьких швидкостях – близько 5 км/год. Правда, вартість таких масивів з постійних магнітів дуже висока, тому поки і не існує жодного комерційного проекту даного роду.

ПОТЯГИ НА МАГНІТНІЙ ПОДУШЦІ У КНИЗІ РЕКОРДОВ ГІНЕССА
На даний момент перший рядок у списку найшвидших поїздів на магнітній подушці утримує японське рішення JR-Maglev MLX01, якому 2 грудня 2003 року на випробувальній трасі в Яманасі вдалося розвинути рекордну швидкість – 581 км / ч. Варто відзначити, що JR-Maglev MLX01 належить ще кілька рекордів, встановлених у період з 1997 по 1999 рік – 531, 550, 552 км/год.

Якщо поглянути на найближчих конкурентів, то серед них варто відзначити шанхайський Maglev Transrapid SMT, побудований в Німеччині, якому вдалося в ході випробувань в 2003 році розвинути швидкість 501 км/год і його прабатька – Transrapid 07, який подолав рубіж в 436 км/год ще в 1988 році.
Детальніше читайте в повнотекстовій статті на нашому сайті в розділі “Цікаве в науці та техніці”.
ДЖЕРЕЛА
- Скрипин В. Поезда на магнитной подушке – транспорт, способный изменить мир. URL: https://itc.ua/articles/poezda-na-magnitnoy-podushke-transport-sposobnyiy-izmenit-mir/
- Теряєв В.І, Ліберт Н.Є. Монорейки КПІ: історія магнітного польоту. Київський політехнік. Газета НТУУ КПІ ім. Ігоря Сікорського. 2018. № 3 (3219). С. 6-7. URL: https://kpi.ua/monorail





