

ПОТЯГИ НА МАГНІТНОЇ ПОДУШЦІ – ТРАНСПОРТ МАЙБУТНЬОГО

Потяги на магнітній подушці, Maglev (від слів «magnetic levitation») – найшвидший вид наземного громадського транспорту. І хоча в комерційну експлуатацію поки введено всього декілька таких систем, дослідження і випробування прототипів магнітних поїздів проводяться в різних країнах. Як розвивалася технологія магнітної левітації і що чекає її в найближчому майбутньому ви дізнаєтеся з цієї статті [1, 2].
ІСТОРІЯ СТАНОВЛЕННЯ
Перші сторінки історії Maglev заповнені рядами патентів, отриманих на початку XX століття в різних країнах. Ще в 1902 році патент на конструкцію поїзда, оснащеного лінійним двигуном, отримав німецький винахідник Альфред Зейден. А вже через чотири роки Франклін Скотт Сміт розробив ранній прототип поїзда на електромагнітному підвісі. Трохи пізніше, в період з 1937 року по 1941 рік, ще кілько патентів, що відносяться до потягів, оснащеним лінійними електродвигунами, отримав німецький інженер Герман Кемпер.
В кінці 1960-х років дослідники перейшли від слова до діла. Британському інженеру Еріку Лейтвейту, якого багато хто називає «батьком Maglevа», вдалося розробити перший робочий повнорозмірний прототип лінійного асинхронного двигуна.

Прототип вагону з лінійним двигуном RTV 31 (проект Tracked Hovercraft)
У 1979 році з’явився перший в світі прототип поїзда на магнітній подушці, ліцензований для надання послуг з перевезення пасажирів – Transrapid 05. Випробувальний трек довжиною 908 м був побудований в Гамбурзі і представлений в ході виставки IVA 79. Інтерес до проекту виявився настільки великий, що Transrapid 05 вдалося успішно пропрацювати ще три місяці після закінчення виставки і перевезти в цілому близько 50 тис. пасажирів. Максимальна швидкість цього поїзда становила 75 км/год.

Система Transrapid 05 на виставці IVA 79
Перший комерційний магнітоплан з’явився в 1984 році в Бірмінгемі, Англія. Залізнична лінія на магнітному підвісі з’єднувала термінал міжнародного аеропорту Бірмінгема і розташовану поруч залізничну станцію. Вона успішно пропрацювала з 1984 по 1995 рік. Протяжність лінії становила всього 600 м, а висота, на яку потяг з лінійним асинхронним двигуном піднімався над полотном дороги – 15 міліметрів. У 2003 році на її місці була побудована система пасажирських перевезень AirRail Link на базі технології Cable Liner.
У 1980-х роках до розробки і реалізації проектів по створенню високошвидкісних поїздів на магнітній подушці приступили не тільки в Англії і Німеччині, а й в Японії, Кореї, Китаї і США.
ЯК ЦЕ ПРАЦЮЄ
Про базові властивості магнітів ми знаємо ще зі шкільних уроків фізики. Кожен в дитинстві грався кільцевими магнітами від динаміків. Якщо піднести північний полюс постійного магніту до північного полюса іншого магніту вони будуть відштовхуватися. Якщо один з магнітів перевернути – притягатися. Цей простий принцип закладений в поїздах Maglevа, які летять по повітрю над шляховим полотном на незначній відстані.
В основі технології магнітного підвісу лежать три основні підсистеми: левітації, стабілізації і прискорення. У той же час на даний момент існує дві основні технології магнітного підвісу і одна експериментальна, доведена лише на папері.
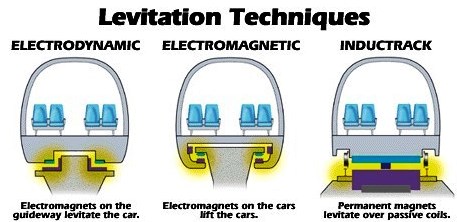
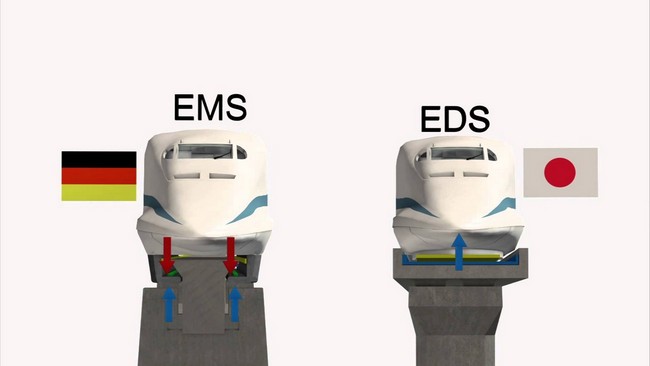
Потяги, побудовані на базі технології електромагнітного підвісу (EMS) для левітації використовують регульовані електромагніти постійного струму. При цьому практична реалізація даної системи схожа на роботу звичайного залізничного транспорту, але замість колісних пар використовується система електромагнітів – опорних і напрямних. Опорні та напрямні магніти при цьому взаємодіють з магнітопроводами, розміщеним на краях Т-подібного шляху. Головний недолік технології EMS – невелика відстань між опорним магнітом і статором, яка становить 15 міліметрів і має контролюватися спеціальними швидкодіючими автоматичними системами регулювання повітряного зазору. На базі технології EMS побудовані поїзда Transrapid і, зокрема, шанхайський Maglev.

Потяги на базі технології EMS приводяться в рух і здійснюють гальмування за допомогою лінійного двигуна, який являє собою звичайний статор (нерухома частина лінійного електродвигуна), розгорнутий вздовж нижньої частини полотна, а опорні електромагніти, в свою чергу, працюють в якості ротора цього електродвигуна. Таким чином, замість отримання крутного моменту, змінний струм в котушках генерує біжуче електромагнітне поле, яке переміщує потяг безконтактно. Зміна сили і частоти змінного струму дозволяє регулювати тягу і швидкість потягу.
У разі застосування технології електродинамічного підвісу (EDS) левітація здійснюється при взаємодії магнітного поля, створюваного надпровідними магнітами на борту потягу з електропровідним полотном. На базі технології EDS побудовані японські поїзда JR-Maglev. На відміну від технології EMS, в якій застосовані звичайні електромагніти з джерелом неперервного живлення, надпровідні електромагніти проводять струм навіть після того, як джерело живлення відключене. Проте, кріогенна система охолодження, яка використовується для підтримання наднизьких температур в котушках, виявляється досить дорогою.
Головною перевагою системи EDS є висока стабільність – при скороченні відстані між полотном і магнітами виникає сила відштовхування, яка повертає магніти в початкове положення, в той же час збільшення відстані знижує силу відштовхування, що веде до стабілізації системи. У цьому випадку ніякої електроніки для контролю і коригування відстані між поїздом і полотном не потрібно.
В той же час, достатня для левітації складу сила виникає тільки на великих швидкостях. З цієї причини поїзд на системі EDS повинен бути оснащений колесами, які забезпечують рух при низьких швидкостях (до 100 км/год).
Варто також відзначити, що сильні магнітні поля в секції для пасажирів породжують необхідність установки магнітного захисту. Без екранування подорож в такому вагоні для пасажирів з електронним стимулятором серця або магнітними носіями інформації (HDD і кредитні картки), протипоказана.
Третьою, близькою до реалізації технологією, яка існує поки тільки на папері, є варіант EDS з постійними магнітами Inductrack, для активації яких не потрібна енергія. До недавнього часу дослідники вважали, що постійні магніти не володіють достатньою для левітації поїзда силою. Однак цю проблему вдалося вирішити шляхом розміщення магнітів у так званий «масив Хальбаха». Магніти при цьому розташовані таким чином, що магнітне поле виникає над масивом, а не під ним, і здатні підтримувати левітацію поїзда на дуже низьких швидкостях – близько 5 км/год. Правда, вартість таких масивів з постійних магнітів дуже висока, тому поки і не існує жодного комерційного проекту даного роду.

ПОТЯГИ НА МАГНІТНІЙ ПОДУШЦІ У КНИЗІ РЕКОРДОВ ГІНЕССА
На даний момент перший рядок у списку найшвидших поїздів на магнітній подушці утримує японське рішення JR-Maglev MLX01, якому 2 грудня 2003 року на випробувальній трасі в Яманасі вдалося розвинути рекордну швидкість – 581 км / ч. Варто відзначити, що JR-Maglev MLX01 належить ще кілька рекордів, встановлених у період з 1997 по 1999 рік – 531, 550, 552 км/год.

Якщо поглянути на найближчих конкурентів, то серед них варто відзначити шанхайський Maglev Transrapid SMT, побудований в Німеччині, якому вдалося в ході випробувань в 2003 році розвинути швидкість 501 км/год і його прабатька – Transrapid 07, який подолав рубіж в 436 км/год ще в 1988 році.
ПРАКТИЧНА РЕАЛІЗАЦІЯ
Поїзд на магнітній подушці Linimo, експлуатація якого почалася в березні 2005 року, був розроблений компанією Chubu HSST і досі використовується в Японії. Він курсує між двома містами префектури Айті. Протяжність полотна, над яким летить Maglev, становить близько 9 км (9 станцій). При цьому максимальна швидкість Linimo дорівнює 100 км/год. Це не завадило йому тільки протягом перших трьох місяців з моменту запуску перевезти понад 10 млн пасажирів.
 Більш відомим є шанхайський Maglev, створений німецькою компанією Transrapid і введений в експлуатацію 1 січня 2004 року. Ця залізнична лінія на магнітному підвісі з’єднує станцію шанхайського метро Лун’ян Лу з міжнародним аеропортом Пудун. Загальна відстань становить 30 км, поїзд долає його приблизно за 7,5 хв, розганяючись до швидкості 431 км/год.
Більш відомим є шанхайський Maglev, створений німецькою компанією Transrapid і введений в експлуатацію 1 січня 2004 року. Ця залізнична лінія на магнітному підвісі з’єднує станцію шанхайського метро Лун’ян Лу з міжнародним аеропортом Пудун. Загальна відстань становить 30 км, поїзд долає його приблизно за 7,5 хв, розганяючись до швидкості 431 км/год.

Ще одна залізнична лінія на магнітному підвісі успішно експлуатується в місті Теджон, Південна Корея. UTM-02 став доступний пасажирам 21 квітня 2008 року, а на його розробку і створення пішло 14 років. Залізнична лінія на магнітному підвісі з’єднує Національний музей науки і виставковий парк, відстань між якими всього лише 1 км.
Серед поїздів на магнітній подушці, експлуатація яких розпочнеться в найближчому майбутньому, варто відзначити Maglev L0 в Японії, його випробування були відновлені зовсім недавно. Очікується, що до 2027 року він буде курсувати за маршрутом Токіо – Нагоя.
ПРОБЛЕМИ
Не так давно популярні журнали називали потяги на магнітній подушці революційним транспортом, а про запуск нових проектів подібних систем із завидною регулярністю повідомляли як приватні компанії, так і органи влади з різних країн світу. Заради об’єктивності слід відмітити, що багато з цих грандіозних проектів не завершені, а деякі працюючі лінії на магнітному підвісі пізніше були законсервовані.
Головною причиною уповільнення впровадження потягів на магнітній підвісці є їх висока вартість. Вони вимагають спеціально побудованої інфраструктури, яка, як правило, і є найбільш витратною статтею в бюджеті проекту. Наприклад, шанхайський Maglev обійшовся Китаю в $ 1,3 млрд або $ 43,6 млн за 1 км двостороннього полотна (включаючи витрати на створення поїздів і будівництво станцій). Конкурувати з авіакомпаніями поїзда на магнітній подушці можуть лише на довших маршрутах. Але знову ж таки, в світі є немало місць з великим пасажиропотоком, необхідним для того щоб транспорта лінія на магнітному підвісі окупилася.
СУЧАСНИЙ СТАН ТА ПЕРСПЕКТИВИ
На даний час монорейковий транспорт утвердився в декількох нішах – як розважальний (у парках, зоопарках, зонах відпочинку, на виставках), як автоматичний транспорт в аеропортах для зв’язку між терміналами та підвезення до міського транспорту, а також як міський та міжміський пасажирський транспорт. Завдяки безшумності та відсутності вібрацій в густонаселених містах монорейковий транспорт може проходити через житлові квартали і навіть наскрізь будинки.

Міжміський високошвидкісний наземний транспорт з лінійним електроприводом у сполученні з магнітним підвісом забезпечує можливість безконтактного руху і складає достойну конкуренцію авіаційному, автомобільному та залізничному транспорту, перш за все з точки зору безпеки, екологічності, безшумності, можливості доставки пасажирів та вантажів безпосередньо в пункти призначення, без пересадок на інші види транспорту.
Значна кількість розвинених країн продовжують інвестувати величезні кошти в проекти зі створення високошвидкісного наземного транспорту. Не так давно в Японії було відновлено швидкісні випробування поїзда на магнітній подушці Maglev L0, який увійде в експлуатацію до 2027 року.
Японський уряд також сподівається зацікавити власними потягами на магнітній подушці США. Нещодавно представники компанії The Northeast Maglev, які планують з’єднати за допомогою залізничної лінії на магнітному підвісі Вашингтон і Нью-Йорк.

Не виключено, що в найближчому майбутньому машини і поїзди на магнітній подушці стануть настільки доступним і повсякденним явищем, що навіть «літаючі автомобілі» виявляться економічно вигідними. Так що чекаємо новин з лабораторій.
ВАКУУМНИЙ ПОТЯГ HYPERLOOP

Ще одним новим напрямком високошвидкісного наземного транспорту є поєднання вакуумного транспорту з лінійним електроприводом і магнітною подушкою – так звана система Hyperloop (гіперпетля), яка впроваджується з 2012 року за сприяння американського інвестора Ілона Маска.
На даний час реалізація Hyperloop здійснюється у США і знаходиться на стадії дослідно-конструкторських робіт та випробувань експериментальних зразків.


Спосіб транспортування вантажів за допомогою пневматичних трубопроводів відомий давно. Але в процесі його реалізації для високошвидкісних вантажо-пасажирських перевезень виникла ідея подолання аеродинамічного опору та тертя капсули о стінки трубопроводу.
Концепція і технічна реалізація
Відповідно до початкового проекту, капсула, яка переміщається в трубі, буде знаходитися на повітряній подушці і зможе підніматися для ковзання над поверхнею траси.
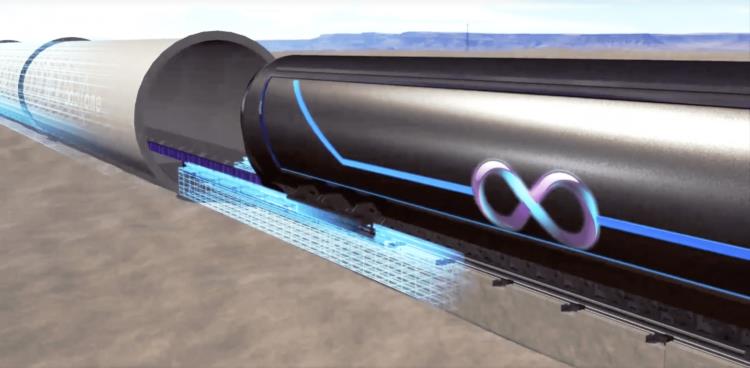
Для того, щоб подолати опір повітря, яке є серйозною перешкодою для капсули, що летить зі швидкістю звуку, творці Hyperloop передбачили вбудований канальний вентилятор, повітряний компресор і систему повітропроводів в передній частині транспортного засобу. Призначення цих пристроїв – переміщення повітряного потоку спереду капсули назад по ходу руху. Крім того, для зниження опору повітря в трубі буде підтримуватися розрідження. В результаті вагони-капсули пересувалися б в герметичній трубі за рахунок різниці тисків. Перед капсулою з пасажирами створювалося б розрідження, близьке до вакууму, за рахунок чого її, по суті, всмоктувало б в трубу.

Так як капсула буде рухатися не в повному вакуумі, зустрічні потоки повітря все-таки будуть на неї впливати. Тому, крім обтічної форми, передбачається розмістити на носі капсули вентилятор, який розподіляв би потоки повітря так, щоб вони підтримували капсулу – створювали повітряну подушку, за рахунок чого вона б летіла, не стикаючись з поверхнею.

В результаті капсули Hyperloop повинні рухатися по трубі з розрахунковою швидкістю від 500 до 1200 км/год (что відповідає швидкості звуку) в залежності від ландшафту і близькості повороту.
Однак далі, в процесі розвитку проекту, виникла ідея застосування магнітної левітації, коли зазор між корпусом капсули і трасою підтримується за допомогою магнітного поля. Перші прототипи, які використовують магнітну левітацію, вже випробувані. Наприклад, в розробці Університету Цинциннаті (США) електродинамічну підвіску капсули забезпечують вісім магнітів, що обертаються з високою швидкістю.
Іншою рушійною силою капсули повинен стати лінійний індукційний електродвигун від якого вона буде отримувати імпульс прискорення або, навпаки, уповільнювати швидкість. Статор лінійного двигуна розміщується в трубі стаціонарно, а ротор, у вигляді індукційних котушок, закріплюється на дні капсули. Магнітне поле, що виникає між ними, буде здійснювати прискорення капсулі. За рахунок нього капсула стартує на початку руху і отримує повторні імпульси по ходу руху. При цьому укладати статор уздовж всього шляху необов’язково – достатньо встановлювати 15-метрові секції двигуна приблизно через кожні 100 м. Лінійний електродвигун буде також використовуватися для зупинки Hyperloop.
Для живлення двигунів електроенергією зверху на трубі передбачається розмістити сонячні панелі. Крім того, під час гальмування капсули кінетична енергія за допомогою лінійних двигунів буде перетворюватись в електричну.

Підсумовуючі викладене можна констатувати, що Hyperloop представляє собою вже відомий нам потяг на магнітній подушці з лінійним електроприводом, поміщений в вакуумний шляхопровід.
УЧАСТЬ КАФЕДРИ АЕМС-ЕП КПІ ІМ. ІГОРЯ СІКОРСЬКОГО В РОБОТАХ ПО ЛІНІЙНОМУ ЕЛЕКТРОПРИВОДУ І СИСТЕМАМ МАГНІТНОГО ПІДВІШУВАННЯ
Якщо Ви дочитали цей матеріал до кінця, закономірно може виникнути питання: все це дуже цікаво, але яке відношення має до цього кафедра автоматизації електромеханічних систем та електроприводу КПІ ім. Ігоря Сікорського? Виявляється, саме безпосереднє.
Історія Київського політехнічного зберігає чимало фактів про наукові розробки, які починалися саме в КПІ. Зокрема, у 1967 р. на території Виставки досягнень народного господарства (ВДНГ) України в м. Києві була побудована монорейкова дорога з лінійним електроприводом довжиною 525 м – спільна розробка кафедри електроприводу і автоматизації промислових установок, кафедри електричних машин та Київського заводу електротранспорту, яка вважається першою в світі трасою монорейки з лінійним електроприводом.

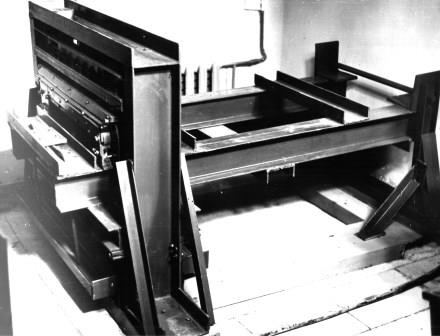
У середині 70-80-х років кафедра АЕМС-ЕП брала активну участь у всесоюзній програмі СРСР по створенню системи високошвидкісного наземного транспорту з лінійним електроприводом та системою магнітного підвішування, призначеної для руху зі швидкістю до 500 км/год. На той час у дворі головного корпусу навіть існувала ділянка транспортної структури довжиною 50 м з діючим макетом екіпажу масою 400 кг, який утримувався на магнітному підвісі.

Макет транспортного екіпажу з найбільшою масою – 2500 кг, що повністю утримувався на регульованому електромагнітному підвісі як по вертикалі, так і по горизонталі, вперше в СРСР, у 1981 р., створили саме в КПІ, на кафедрі АЕМС-ЕП в лабораторії 014 корпусу №20 ФЕА.

Незважаючи на фінансові обмеження і технічні складнощі, роботи в області систем магнітного підвішування та лінійного електропривода продовжуються на кафедрі АЕМС-ЕП і зараз. Так, в останні роки було захищено 7 магістерських дисертацій за тематикою лінійного електроприводу та магнітного підвішування, у т. ч. із демонстрацією діючої системи електромагнітного підвісу, опубліковано 5 наукових статей і розділ у підручнику, отримано 2 патенти України і 2 авторських права на системи регульованого електромагнітного підвісу та лінійного електроприводу.


Більше матеріалів про напрацювання кафедри АЕМС-ЕП в галузі систем високошвидкісного наземного транспорту з лінійним електроприводом і магнітним підвішуванням міститься в [2].
ДЖЕРЕЛА
- Скрипин В. Поезда на магнитной подушке – транспорт, способный изменить мир. URL: https://itc.ua/articles/poezda-na-magnitnoy-podushke-transport-sposobnyiy-izmenit-mir/
- Теряєв В.І, Ліберт Н.Є. Монорейки КПІ: історія магнітного польоту. Київський політехнік. Газета НТУУ КПІ ім. Ігоря Сікорського. 2018. № 3 (3219). С. 6-7. URL: https://kpi.ua/monorail





