

Розвиток теорії бездавачевого векторного керування електромеханічними системами з асинхронними двигунами
Спеціальність 05.09.03 – електротехнічні комплекси та системи
Дисертацією є рукопис.Робота виконана на кафедрі автоматизації електромеханічних систем та електроприводу Національного технічного університету України «Київський політехнічний інститут імені Ігоря Сікорського» Міністерства освіти і науки України
| Науковий консультант: | доктор технічних наук, професор
Пересада Сергій Михайлович, Національний технічний університет України «Київський політехнічний інститут імені Ігоря Сікорського», завідувач кафедри автоматизації електромеханічних систем та електроприводу. |
| Офіційні опоненти: | доктор технічних наук, професор
Чорний Олексій Петрович, Кременчуцький національний університет імені Михайла Остроградського, директор Навчально-наукового інституту електро-механіки, енергозбереження і систем управління; |
| доктор технічних наук, професор
Щур Ігор Зенонович, Національний університет «Львівська політехніка», завідувач кафедри електромехатроніки і комп’ютеризованих електромеханічних систем; |
|
| доктор технічних наук, професор, член-кореспондент НАН України Волков Ігор Володимирович, Інститут електродинаміки НАН України, головний науковий співробітник відділу перетворення та стабілізації електромагнітних процесів. |
ЗАГАЛЬНА ХАРАКТЕРИСТИКА РОБОТИ
Актуальність теми. Електромеханічні системи (ЕМС) автоматичного керування різних технологічних призначень споживають більше ніж половину генерованої в світі електричної енергії, перетворюючи її в механічну енергію за допомогою електроприводів різних типів. При цьому частка енергії, що перетворюється за допомогою електроприводів змінного струму, перевищує 90%, з яких більш як 80% належить асинхронним двигунам (АД). Значне поширення асинхронних двигунів зумовлене простотою їх конструкції, низькою вартістю, високою надійністю, а в останні десятиріччя значним розвитком теорії керування цим типом двигунів та засобів силової електроніки.
 |
 |
 |
 |
Постійне зростання загального рівня технологічного розвитку та вимог до якості і вартості продукції, а також стрімкий розвиток електромобільності, ставить перед світовими науковими школами нові задачі для подальшого підвищення якості керування, енергетичної ефективності та надійності електромеханічних систем.
Значний внесок у розвиток методів керування асинхронними двигунами зроблено закордонними та вітчизняними науковцями, такими як: О. В. Садовой, А. О. Лозинський, І. З. Щур, О. П. Чорний, Л. І. Мазуренко, J. Holtz, T. Lipo, P. Vas, D. Novotny, K. Rajashekara, A. Kawamura, K. Matsuse, H. Kubota, M. Kazmierkowski, R. Marino, R. Lorenz, M. Bodson та інші.
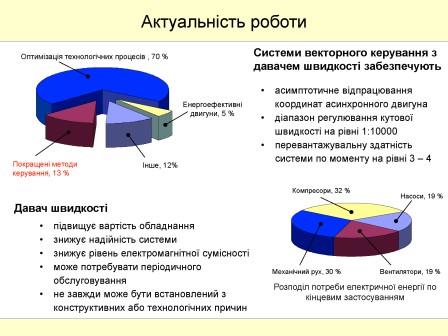
Основною метою більшості електроприводів є узгоджене керування координатами технологічних об’єктів з метою забезпечення вимог технологічного процесу. Оскільки показники якості керування координатами електроприводів значною мірою визначають продуктивність устаткування, якість продукції та впливають на показники енерго і ресурсозбереження, то зростаючі вимоги до кінцевої продукції та її собівартості вимагають постійного їх вдосконалення. Враховуючи домінуючу частку асинхронних електроприводів в індустріальному, комунальному, сільськогосподарському та транспортних секторах економіки, принциповим є вирішення проблеми підвищення показників якості керування та енергетичної ефективності електромеханічних систем з асинхронними електродвигунами, які є нелінійними багатовимірними об’єктами з частково вимірюваним вектором стану, що знаходяться під дією координатних та параметричних збурень. Загалом ця задача може вважатися вирішеною для ЕМС з високою точністю керування вихідними координатами (металообробка, робототехніка, системи позиціонування), в яких використовується векторне полеорієнтоване керування на основі інформації про механічні координати електродвигуна. Між тим в найбільш значимих як по кількості, так і по перетворюваній потужності ЕМС технологічних об’єктів з низькими та середніми вимогами до статичних та динамічних показників якості керування координат (турбомеханізми, підйомно-транспортні системи, екструзійне устаткування, прокатне виробництво та ін.) безпосереднє отримання інформації про механічні координати не передбачається або є недоцільним, що обумовлено вимогами надійності, конструктивними особливостями, а при малих потужностях також економічними факторами. Структура системи без давача швидкості (бездавачеві системи) визначає найбільш складну постановку задачі керування об’єктами, в яких повний вектор регульованих координат електромеханічного перетворювача (механічні та електромагнітні координати) не є вимірюваним, тобто в умовах неповної інформації про технологічний об’єкт, частина параметрів якого додатково може бути невизначеною.
Методи керування, що впроваджені в комерційних виробах для цього класу технологічних застосувань, значною мірою не мають строгого теоретичного обґрунтування, а за показниками якості керування координатами електромеханічного перетворювача та технологічного об’єкта не задовольняють вимогам значної кількості технологічних застосувань. Це обумовлює актуальність розвитку та вдосконалення теорії векторного керування електромеханічними системами на основі АД без вимірювання механічних координат, чому і присвячена дана дисертаційна робота.
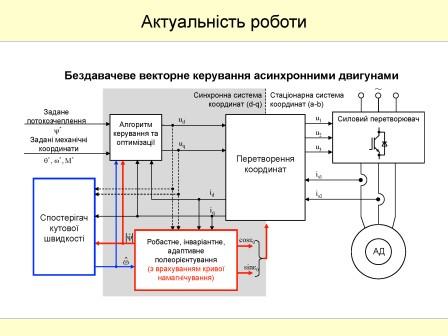
В роботі розглядається науково-прикладна проблема відпрацювання заданих траєкторій зміни механічних координат електромеханічної системи (моменту, кутової швидкості) та модуля вектора потокозчеплення з одночасним асимптотичним полеорієнтуванням в умовах, коли механічні координати та компоненти вектора потокозчеплення недоступні для вимірювання. Вирішення цієї проблеми в системах бездавачевого керування АД дозволяє задовольнити вимоги більшості технологічних застосувань електромеханічних систем до показників якості керування механічними координатами, використовувати енергетично ефективні алгоритми керування потокозчепленням електромеханічного перетворювача, не впливаючи при цьому на процеси регулювання механічних та технологічних координат електромеханічних систем автоматичного керування.
Зв’язок роботи з науковими програмами, планами, темами. Дослідження за темою дисертаційної роботи виконувалися на кафедрі автоматизації електромеханічних систем та електроприводу Національного технічного університету України «Київський політехнічний інститут імені Ігоря Сікорського» за темами, які фінансувалися Міністерством освіти і науки України: «Основи теорії високоефективних систем автоматичного керування складними технологічними об’єктами з векторно-керованими електродвигунами», “Основи теорії адаптивних електромеханічних систем автоматичного керування з векторно-керованими електродвигунами змінного струму в умовах неповної інформації”, «Основи теорії векторно-керованих електромеханічних систем змінного струму з кінематичною парою кочення», «Методи робастного адаптивного керування електромеханічними системами з підвищеними динамічними та енергетичними показниками», «Розробка енергоефективної електромеханічної системи електробусу на основі адаптивного векторно-керованого асинхронного електроприводу з акумуляторно-суперконденсаторним живленням», а також в рамках виконання госпрозрахункових договорів: «Розробка програмного забезпечення блоку керування дослідного зразка тягового електроприводу та дослідження його характеристик», «Розробка системи керування тягового електроприводу трамвайного вагону». Частина досліджень виконувалася в рамках міжвузівського співробітництва з Університетом Ноттінгема (Великобританія) за напрямом «Векторне керування координатами асинхронного двигуна з максимізацією відношення момент-струм», а також Університетом прикладних наук Гессена (Німеччина) за напрямом «Системи векторного керування асинхронними двигунами з підвищеними показниками якості керування та енергетичної ефективності». При виконанні науково-дослідних робіт автор розробив нові структури систем векторного керування механічними та електромагнітними координатами асинхронного двигуна, концепцію та метод синтезу бездавачевого векторного керування при прямому полеорієнтуванні, виконав практичну реалізацію та експериментальне тестування розроблених структур керування, керував розробкою, виготовленням та експериментальним тестуванням дослідних зразків електроприводів для промислового впровадження, а також виконував функції відповідального виконавця та керівника проектів.
Мета і задачі дослідження. Метою роботи є розвиток теорії синтезу та аналізу бездавачевих електромеханічних систем з векторно-керованими асинхронними електродвигунами, спрямований на підвищення їх динамічних та статичних характеристик шляхом застосування методів нелінійного та адаптивного керування.
 |
 |
 |
 |
Для досягнення поставленої мети вирішувалися такі основні задачі:
- аналіз існуючих методів бездавачевого векторного керування (БВК) координатами асинхронних двигунів, в тому числі реалізованих в серійних електроприводах, з метою визначення їх досяжних показників якості керування та обґрунтування необхідності вирішення науково-прикладної проблеми, що розглядається в роботі;
- аналіз природних властивостей стійкості асинхронного двигуна та розробка методів квазівекторного керування кутовою швидкістю, максимально простих з точки зору практичної реалізації;
- розробка нової концепції векторного керування координатами асинхронних двигунів при неповній інформації про вектор стану;
- розробка нового методу синтезу алгоритмів векторного керування асинхронними двигунами без вимірювання механічних координат;
- розробка методу оцінювання невимірюваних механічних координат АД на основі інформації про струми та напруги статора;
- вирішення основних задач керування координатами електромеханічних систем з асинхронними двигунами на основі розроблених методів синтезу та оцінювання;
- розробка пакету моделюючих програм та дослідження розроблених структур векторного керування методом математичного моделювання;
- створення апаратних та програмних засобів для практичної реалізації систем бездавачевого векторного керування АД;
- проведення експериментальних досліджень та промислове впровадження.
Об’єкт дослідження – процеси керування координатами в електромеханічних системах на основі асинхронних двигунів з короткозамкненим ротором без вимірювання механічних координат.
Предмет дослідження – методи аналізу та синтезу алгоритмів векторного керування електромеханічними системами на основі асинхронних двигунів без вимірювання механічних координат.
Методи дослідження. Викладені в роботі результати отримані з використанням методів сучасної нелінійної теорії керування таких як: лінеаризація зворотним зв’язком, другий метод Ляпунова, адаптивне керування, теорія сингулярно вироджених систем, а також методів математичного та фізичного моделювання.
Наукова новизна одержаних результатів.
- Розроблено нову концепцію прямого векторного керування регульованими координатами асинхронних двигунів: вектором потокозчеплення і кутовою швидкістю в умовах їх невимірюваності, яка є загальнотеоретичною основою для розробки методів синтезу алгоритмів керування і полягає в тому, що за рахунок дії нелінійного керування цілеспрямовано формується декомпозиція вихідної структури електромеханічного об’єкта на три зв’язані підсистеми, властивості стійкості і робастності яких забезпечують композитній системі локальну експоненційну стійкість.
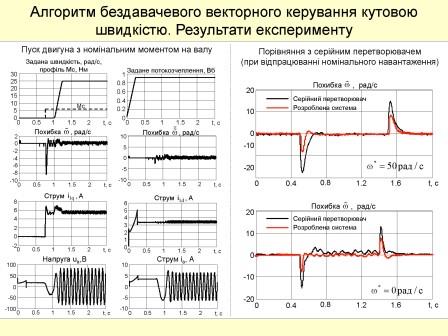
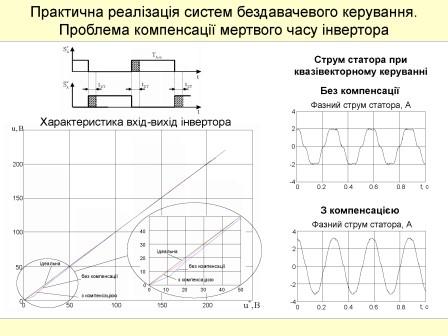
- Розроблено новий метод синтезу векторних керувань асинхронними машинами без вимірювання механічних координат, які формують композитну структуру у вигляді нелінійно зв’язаних підсистем адаптивного оцінювання кутової швидкості, механічної та електромагнітної з властивостями експоненційної стійкості і ієрархічним розділенням у часі динамічних процесів, що, за умов персистності збудження, гарантує замкненій композитній системі локальну експоненційну стійкість, завдяки чому вперше забезпечується робастне до неідеальностей інвертора відпрацювання заданих траєкторій кутової швидкості і модуля вектора потокозчеплення з одночасним асимптотичним полеорієнтуванням.
- Розроблено новий метод розімкненого квазівекторного керування асинхронним двигуном (без вимірювання струмів і кутової швидкості), який за рахунок формування нелінійних компенсуючих складових, синтезованих з використанням другого методу Ляпунова, забезпечує асимптотичне відпрацювання заданих траєкторій зміни кутової швидкості та модуля вектора потокозчеплення в умовах відсутності навантаження, а також локальну стійкість у навантаженому стані в області, яка визначається параметрами АД.
- Вперше розроблено метод адаптивного оцінювання сталої або такої, що повільно змінюється, кутової швидкості та потокозчеплень ротора асинхронної машини, який на основі запропонованої форми функції Ляпунова та спеціального перетворення координат дозволяє подолати проблему нелінійної параметризації в рівняннях моделі АД, виходи яких не вимірюються, і завдяки цьому синтезувати адаптивний спостерігач вектора потокозчеплення ротора з властивістю локальної експоненційної асимптотичної стійкості за умов персистності збудження.
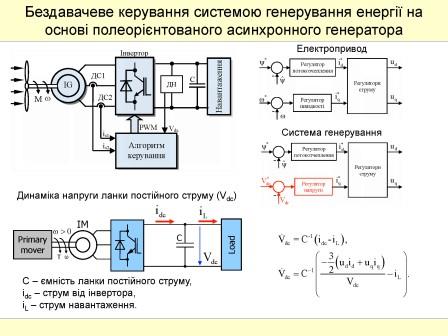
- Вдосконалено метод прямого полеорієнтованого векторного керування асинхронним генератором шляхом побудови адаптивної системи, яка базується на використанні адаптивного спостерігача потокозчеплення та кутової швидкості ротора по п.4 та нелінійного принципу розділення, завдяки чому вперше забезпечується локальне асимптотичне регулювання напруги в ланці постійного струму, а також відпрацювання модуля вектора потокозчеплення ротора без вимірювання кутової швидкості.
- Вдосконалено метод бездавачевого векторного керування моментом з максимізацією співвідношення момент-струм шляхом врахування насичення магнітної системи двигуна, а також формування заданого потокозчеплення як динамічної функції моменту, що вперше дозволило забезпечити його асимптотичне відпрацювання як в статиці, так і в динаміці в усьому діапазоні зміни моменту.
 |
 |
 |
 |
Практичне значення одержаних результатів.
- Розвинуто теорію синтезу систем БВК асинхронними двигунами, що дозволило підвищити показники якості регулювання координат в широкому ряді промислових механізмів, в яких застосовуються різні модифікації частотного керування. В електромеханічних системах середньо -динамічних застосувань реалізовано можливість забезпечення необхідного рівня показників якості регулювання механічних координат без встановлення датчика швидкості, що підвищує їх надійність, зменшує вартість і витрати на обслуговування.
- Структура алгоритму квазівекторного керування забезпечила можливість формування покращених статичних і динамічних характеристик, а також форсування процесів збудження асинхронної машини при повністю розімкненому керуванні, що дозволило розширити сферу використання розімкнених систем керування асинхронними двигунами.
- Розроблені алгоритми бездавачевого керування асинхронним генератором дозволили підвищити надійність та знизити вартість систем генерування електричної енергії на їх основі.
- Алгоритми бездавачевого керування з максимізацією відношення момент-струм та врахуванням кривої намагнічування дозволили створити тягові електроприводи для електричного транспорту з покращеними енергетичними та динамічними характеристиками.
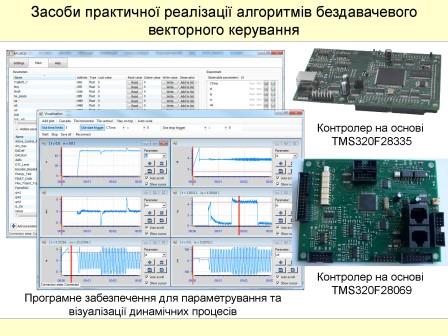
- Розроблена технологія швидкого прототипного тестування алгоритмів керування асинхронними двигунами, яка включає в себе пакет моделюючих програм, сімейство контролерів на основі цифрових сигнальних процесорів (TMS320F28335, TMS320F28069) та програмне забезпечення для них, а також ряд експериментальних стендів з асинхронними двигунами в діапазоні потужностей від 0.75 до 50 кВт, дозволяє виконувати практичну реалізацію та експериментальні дослідження нових структур керування в лабораторних умовах в терміни, які співрозмірні з термінами проведення математичного моделювання.
- Розроблено, виготовлено та експериментально протестовано ряд систем БВК потужністю до 240 кВт, в тому числі три дослідні зразки тягового електроприводу з покращеними динамічними та енергетичними характеристиками для використання в тролейбусах, трамваях та електробусах.
- Результати роботи впроваджено: в серійних загальнопромислових асинхронних електроприводах потужністю від 15 до 100 кВт виробництва ТОВ «Енергоресурс», м. Львів; в дослідному зразку тягового електроприводу для перспективних моделей тролейбусів та трамвайних вагонів в ДП «Науково-дослідний та конструкторсько-технологічний інститут міського господарства», м. Київ; в дослідному зразку тягового електроприводу трамвайного вагона потужністю 180 кВт виробництва ПрАТ «Запорізький електроапаратний завод», м. Запоріжжя; в учбовий процес в Національному технічному університеті України «Київський політехнічний інститут імені Ігоря Сікосрького» при викладанні дисциплін «Моделювання електромеханічних систем», «Електромеханічні системи електричних транспортних засобів», «Цифрова обробка сигналів в електромеханічних системах».
 |
 |
Публікації. За результатами досліджень опубліковано 64 наукові праці, у тому числі 1 монографія, 49 статей у наукових фахових виданнях (з них 1 стаття у виданні іноземної держави, 9 у виданнях України, які включені до міжнародних наукометричних баз), 14 тез доповідей у збірниках матеріалів конференцій.





