

Навчальний посібник включає завдання та методичні матеріали щодо виконання та оформлення курсової роботи з дисципліни «Теорія адаптивного та робастного керування». Призначений для здобувачів ступеня магістра наукового спрямування за освітньою програмою «Електромеханічні системи автоматизації, електропривод та електромобільність» спеціальності 141 «Електроенергетика, електротехніка та електромеханіка».
ТЕОРІЯ АДАПТИВНОГО ТА РОБАСТНОГО КЕРУВАННЯ: КУРСОВА РОБОТА
Автори: С. М. Пересада, докт. техн. наук, C. М. Ковбаса, канд. техн. наук, Є. О. Ніконенко, асп.
Афіліація: НТУ України «КПІ ім. Ігоря Сікорського», пр. Берестейський, 37, Київ, 03056, Україна
Вступ
Дисципліна “Теорія адаптивного та робастного керування. Курсова робота” є однією із заключних у підготовці магістрів за освітньо-науковою програмою “Електромеханічні системи автоматизації, електропривод та електромобільність”. Курсова робота об’єднує методи керування, які розглянуто в дисциплінах на попередніх курсах підготовки: «Теорія автоматичного керування», «Моделювання електромеханічних систем», «Робототехніка та мехатроніка», «Керування електроприводами», «Курсовий проект з керування електроприводами» першого (бакалаврського) рівня та «Ідентифікація, спостереження, адаптивне керування в електромеханічних системах» другого (магістерського) рівня.
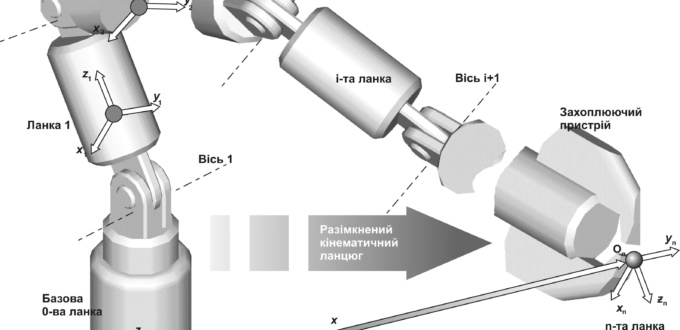
Метою курсової роботи є імплементація методів робастних систем для керування промисловими роботами в задачах відпрацювання заданих траєкторій руху, які конструюються за рахунок розв’язку прямої і оберненої задачі кінематики методом Денавіта-Хартенберга. Робастність алгоритмів керування передбачається дослідити моделюванням системи відпрацювання координат робочого органу в умовах врахування точок виродженості. У результаті вивчення дисципліни студенти повинні набути знань зі структури, методів керування та налаштування систем керування рухом.
Курсова робота представлена в 26-х варіантах, які надані у додатку А. Розв’язок задач слід супроводжувати необхідними поясненнями та математичними викладками. Вимоги до оформлення курсових робіт наведено у додатку Б.
ІНДИВІДУАЛЬНІ ЗАВДАННЯ
- Зменшити довжини ланок так, щоб наблизити зону виродженості маніпулятора на відстань до фігури. Дослідити поведінку узагальнених швидкостей у порівнянні з базовим випадком.
- Виконати розрахунок траєкторії руху при обмеженості ривка на рівні 1000 м/с3.
- Виконати розрахунок прямої задачі кінематики для триланкового маніпулятора.
С. М. Пересада, C. М. Ковбаса, Є. О. Ніконенко, Теорія адаптивного та робастного керування: курсова робота, Київ: КПІ ім. Ігоря Сікорського, 2020, 55 с.
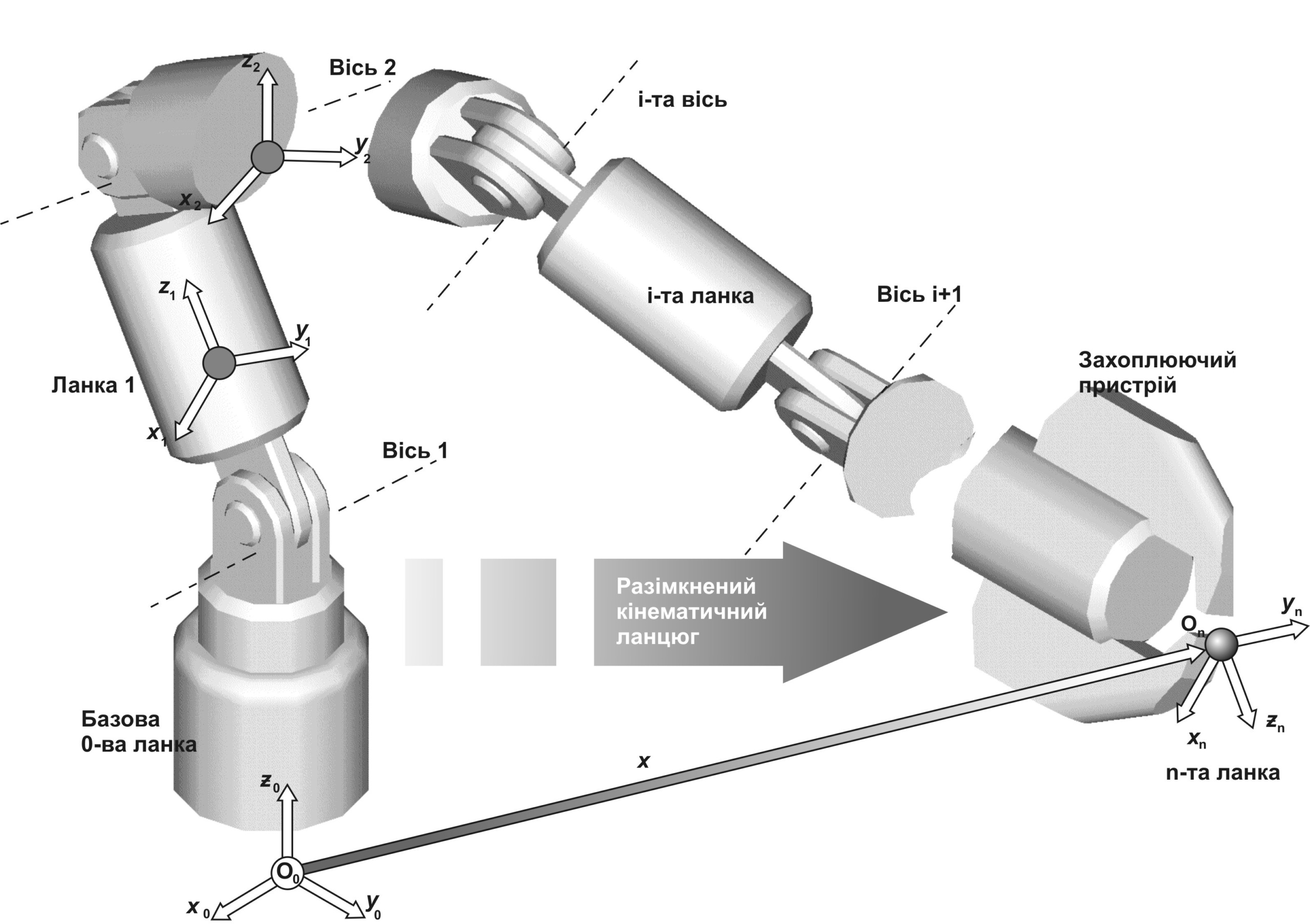
Кінематична схема багатоланкового маніпулятора з деталізацією систем відліку





