


ВЫСОКОПРОИЗВОДИТЕЛЬНЫЙ УНИФИЦИРОВАННЫЙ КОНТРОЛЛЕР НА ОСНОВЕ DSP TMS320F28335 ДЛЯ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ
Функциональная схема разработанного унифицированного контроллера показана на рис. 1, а его внешний вид на рис. 2. Ядро контроллера основано на цифровом сигнальном процессоре (ЦСП) TMS320F28335, который содержит 32-разрядное ядро с модулем выполнения операций над вещественными числами (Floating Point Unit), модули прямого доступа к памяти и обработки прерываний, а также широкий набор коммуникационных интерфейсов и периферийных модулей.
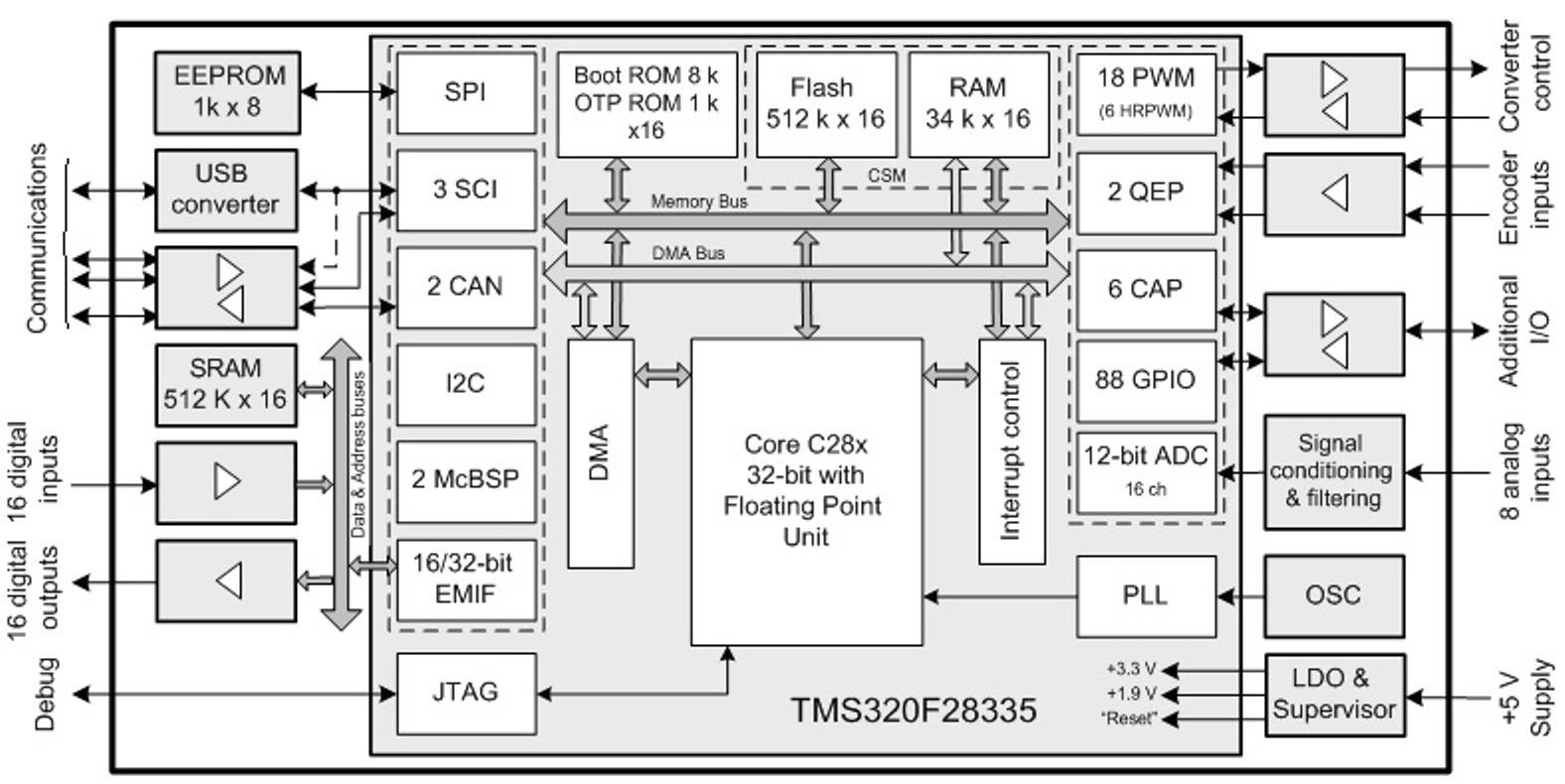
Рис. 1. Функциональная схема унифицированного контроллера
Конструктивное выполнение контроллера обеспечивает возможность его встраивания как в существующие, так и в разрабатываемые силовые преобразователи. Специализированные периферийные модули ЦСП, такие как генераторы широтно-импульной модуляции (ШИМ (PWM)), обработчики квадратурных сигналов от фотоимпульсных датчиков скорости (QEP), модули захвата сигналов (CAP), аналогово-цифровой преобразователь (ADC), используемые для построения управляющих устройств электротехнических и электромеханических систем характеризуются высокими показателями качества первичной обработки сигналов и гибкостью настройки под различные схемотехнические решения. Данные свойства сохранены и в схемах согласования сигналов, расположенных на плате контролера, с целью обеспечения достаточно высокого уровня унификации. Как видно из рис. 1, в контроллере предусмотрена возможность использования высокоскоростных коммуникационных интерфейсов, что позволяет строить распределенные системы управления в реальном времени, осуществлять визуализацию динамических процессов и производить настройку системы. Основные характеристики контроллера приведены в табл. 1.
Рис. 2. Внешний вид контроллера
Таблица 1. Характеристики контроллера
| Тактовая частота, разрядность ядра/памяти | 150МГц, 32-bit/16-bit. |
| Память | 256k х 16 Flash, 34k x 16 SRAM, 8k x 16 Boot ROM 1k x 16 OTP ROM (on-chip); 512k x 16 SRAM, 1k х 8 Serial EEPROM (on-board). |
| Количество универсальных аналоговых входов | 8, 12 разрядный АЦП с временем преобразования 80 нс. |
| Дискретные входы/ выходы | 16/16. |
| Управление силовыми преобразователями | 9 конфигурируемых ШИМ выходов; 6 входов для сигналов драйверной защиты силовых ключей. |
| Сигналы фотоимпульсных датчиков скорости; модули захвата сигналов | 2 канала для подключения фотоимпульсных датчиков скорости/положения; до 6 входов модуля захвата сигналов. |
| Коммуникационные интерфейсы | USB 2.0 (on-board); 1 синхронный последовательный порт; 2 асинхронных последовательных порта; сигналы CAN интерфейса для внешнего трансивера. |
| Программирование и отладка | Интерфейс JTAG, три отладочных светодиода. |
| Габаритные размеры, питание | 125 х 80 х 25, +5 В. |
Разработка и отладка программного обеспечения контроллера осуществляется с помощью JTAG интерфейса и программного пакета Сode Composer Studio.
Благодаря высокой производительности процессора, богатой периферии и функциональной гибкости, разработанный контроллер, позволяет реализовать практически любой из известных алгоритмов управления двигателем переменного либо постоянного тока.
Для унифицированного контролера разработано базовое программное обеспечение (ПО), которое фактически является его операционной системой. ПО имеет типовую структуру, применяемую в системах реального времени, при этом квантование по времени осуществляется по прерываниям аппаратного таймера процессора с регулируемым временным интервалом.
Для управления силовыми преобразователями разработаны подпрограммы формирования импульсов управления ключами по законам векторной и скалярной ШИМ с настраиваемым мертвым временем, а также реализована компенсация влияния мертвого времени на процессы управления электрической машиной.
Модуль измерения аналоговых сигналов синхронизирован с процессами генерирования ШИМ так, что аналоговые преобразования осуществляются в моменты времени, когда отсутствует коммутация силовых ключей, что позволяет минимизировать коммутационные помехи в сигналах выходных токов инвертора.
Связь управляющего контроллера с персональным компьютером (ПК) организована с использованием USB-интерфейса. Для настройки систем построенных на основе разработанного унифицированного контроллера разработано специальное программное обеспечение, которое дает возможность считывать и устанавливать необходимые значения параметров, а также визуализировать процессы в реальном масштабе времени, с последующим сохранением результатов в удобных для дальнейшего анализа форматах. Во время проведения эксперимента одновременно могут отображаться до 16 внутренних переменных контроллера с дискретностью 200..800 мкс.
Учитывая высокую производительность и широкие возможности по визуализации процессов, контроллер может быть использован не только для промышленного внедрения новых алгоритмов управления, но и для построения исследовательских лабораторных установок с применением концепции быстрого прототипного тестирования. При этом разработанное базовое ПО, позволяет осуществлять практическую реализацию новых алгоритмов управления в короткие сроки, соизмеримые со временем, которое затрачивается на построение модели в популярных пакетах моделирующих программ.





